Vitesse et accélération dans différents systèmes de coordonnées
LES DIFFERENTS SYSTEMES DE COORDONNEES
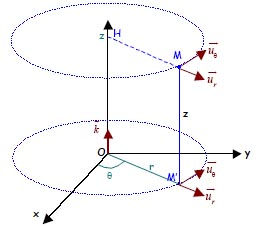
Coordonnées cylindriques
Base orthonormée directe:
![]()
Coordonnées cylindriques
du point M: ![]()
Lien entre coordonnées
cylinriques et coordonnées cartésinnes: ![]()
Coordonnées sphériques
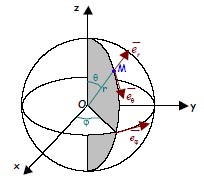
Base orthonormée directe:![]()
Coordonnées du point M: ![]()
Lien entre coordonnées sphériques
et coordonnées cartésiennes: 
VITESSE ET ACCELERATION
Définition
Soit ![]() l'équation de la trajectoire.
l'équation de la trajectoire.
Le vecteur vitesse est
![]() ; il est en tout point tangent à la trajectoire. Sa norme s'exprime en
m/s.
; il est en tout point tangent à la trajectoire. Sa norme s'exprime en
m/s.
Le vecteur accélération
est ![]() ;
il n'est a priori pas tangent à la trajectoire, mais il est toujours
dirigé vers le centre de la trajectoire. Sa norme s'exprime en m/s2.
;
il n'est a priori pas tangent à la trajectoire, mais il est toujours
dirigé vers le centre de la trajectoire. Sa norme s'exprime en m/s2.
Vitesse et accélération en coordonnées cartésiennes
En coordonnées cartésiennes,on a :
trajectoire :  ,
vitesse :
,
vitesse :  ,
accélération :
,
accélération :  .
.
Vitesse et accélération dans le repère de Frenet
Cette base intrinsèque
est constituée de deux vecteurs untaires (un vecteur tangent à
la trajectoire ret un vecteur normal à la trajectroire et dirigé
vers son centre de courbure): base orthonormée intrinsèque: ![]() .
On note R le rayon de courbure.
.
On note R le rayon de courbure.
vitesse: ![]() ,
accélération:
,
accélération:  .
.
MOUVEMENT CIRCULAIRE UNIFORME
Soit n la fréquence du mouvement (en tour/seconde) et R le rayon de la trajectoire (en mètre).
La période est ![]() ;
la vitesse angulaire vaut en norme
;
la vitesse angulaire vaut en norme ![]() (rad/s);
la vitesse linéaire vaut en norme
(rad/s);
la vitesse linéaire vaut en norme ![]() (m/s).
(m/s).
Coordonnées dans la base de Frenet:
vitesse: ![]() ;
accélération:
;
accélération: ![]() .
.